【数据挖掘】预处理(Preprocessing)
Outline
| Chapter | Overview |
|---|---|
| 1. | 为什么要对数据预处理 |
| 2. | 数据描述性总结 |
| 3. | 数据清洗 |
| 4. | 数据变换 |
| 5. | 数据整合 |
| 6. | 数据归约 |
| 7. | 离散化与概念层级 |
| 8. | 总结 |
Chapter 1. 为什么要预处理
我们从现实生活中获得的原始数据,或多或少会因为各种原因不能直接使用。例如:
- 不完整
- 收集时的“不适用”数据值
- 收集数据的时间和分析数据的时间之间的不同考虑
- 人力/硬件/软件问题
- 噪声
- 数据采集仪器故障
- 数据输入时的人为或计算机错误
- 数据传输错误
- 格式不一致
- 不同的数据源
- 不同规格的采集方式和标准
- 重复数据
数据的质量决定了数据挖掘的质量
数据预处理的主要任务
| Tasks | Conception |
|---|---|
| 数据清洗 | 填充缺失值、平滑噪声、识别离群点、解决不一致 |
| 数据整合 | 多个不同来源的数据聚合 |
| 数据变换 | 标准化和聚集 |
| 数据归约 | 减少数据量,但保留主要信息 |
| 数据离散化 | 对连续的数值数据进行离散化 |
Chapter 2. 数据描述性总结
中心趋势度
指的是一组数据向某一中心值靠拢的程度,反映了一组数据的中心点所在。
1️⃣ 均值
最常见的统计量,可以表征数据的总体水平。但均值对于噪声比较敏感。
2️⃣ 中位数
先排序,再找中心。毫无疑问,这个方法的时间开销至少是级别的。所以有时候,我们可以采用近似估计的方式去计算。
假定数据可以通过数值划分为区间,且知道每个区间的个数。于是,中位数可用以下的公式表示。
3️⃣ 众数
众数是一组数据中出现最多的数值,有多少个众数,那么我们称数据集为多少峰,例如一个众数:单峰,两个:双峰。
4️⃣ 中列数
Midrange,表示最大值和最小值的均值。也可以度量中心趋势哦。不过与其说度量中心,倒不如说是数据范围的中心,正如mid和range的意思一般。

尾巴往哪甩,数据往哪偏
离散趋势度
用于评估数据的散布或发散程度。
1️⃣ 极差、四分位数和四分位数极差
极差(Range)也称范围误差或者全距,指的是最大值和最小值的差距。也是衡量变动最简单的指标。
四分位数:将数据从大到小排序后,用三个点(25,50,75)将数据分为三等分,这三个点上对应的位置就是四分位数。例如表示第一四分位数,第二四分位数,第三四分位数。
分半四分位差:即
四分位数极差(IQR):,它给出了数据中间一半的部分。
2️⃣ 五数概括、盒图和离群点
哪五个数?
- min
- max

从下往上分别是:最小值、Q1、中位数、Q3、最大值
盒图又称箱线图,盒须图,体现了五数概括。利用四分位数间距,我们可以判断界限,找出异常值。通常设定1.5倍外的为异常值。所以边界为:
正态分布曲线
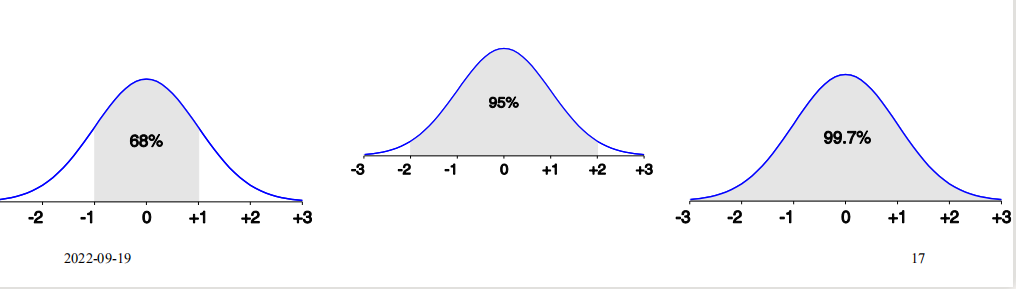
- 区间有的数据量
- 区间有的数据量
- 区间有的数据量,超过此区间的数据,我们就可以将其视作离群点了(小概率事件)
直方图分析
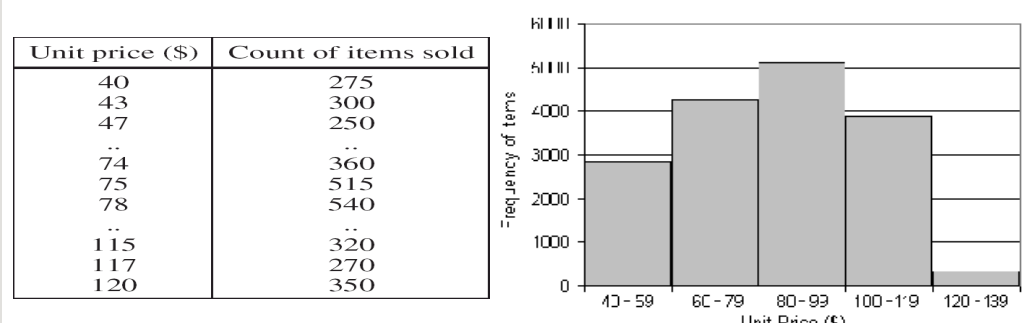
直方图方便我们观察数据的分布情况
QQ图 Quantile-Quantile Plot
QQPlot图是用于直观验证一组数据是否来自某个分布,或者验证某两组数据是否来自同一(族)分布。在教学和软件中常用的是检验数据是否来自于正态分布。
公式描述为:
对于一组递增排序的数据,表示有的数据小于或等于。

一般来说,横坐标为实际分位数,纵坐标为标准分布,若QQ图的点分布在y=x曲线附近,说明数据近似正态分布。
散点图
一般是二维或者三维散点图,用来查看数据的聚类、离群点,或是两个特征之间的相关性。

路易斯曲线 Loess Curve
在散点图中增加一条曲线,用来拟合回归数据的

Chapter 3. 数据清洗
数据清洗可以说是数据仓库中的核心问题
数据清洗的主要任务
| Tasks |
|---|
| 填充缺失值 |
| 识别异常值和平滑噪声 |
| 纠正不一致的数据 |
| 解决冗余问题 |
1️⃣ 缺失值
常见处理手段有:
- 忽略该数据,通常在某些关键数据缺失(比如分类时的
label标签缺失)时进行 - 填充缺失值
- 基于统计信息
- 基于推理信息,如贝叶斯、决策树
- 基于各种模型
2️⃣ 噪声
在一个被测量的变量中的随机误差或方差
噪声一般来说是数据中的随机误差,当然,不一致或者重复的数据也可也算作噪声。
常见的处理手段有:
- Binning
- 将数据排序后分组(bins)
- 按照各个组的中值、边缘等对噪声进行平滑处理
- 回归
- 通过回归函数平滑噪声
- 聚类
- 检测和移除离群点
- 计算机结合人类
- 单走一个6
Binning算法可以分为等距离划分和等频率划分:
| 等距离 | 等频率 |
|---|---|
| 也叫等宽度(Equal-width) | 也叫等深度(Equal-depth) |
| 将数据划分为N个宽度相同的间隔 | 将数据划分为N个元素数量相同的间隔 |
| 每个间隔的大小为: | 每个间隔的元素大小为: |
| 容易受到异常影响!且稀疏数据很难处理 | 具有良好的数据缩放 |
我们举个binning的栗子
假设有这样一组数据:
| age | 23 | 23 | 27 | 27 | 39 | 41 | 47 | 49 | 50 | 52 | 54 | 54 | 56 | 57 | 58 | 58 | 60 | 61 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| %fat | 9.5 | 26.5 | 7.8 | 17.8 | 31.4 | 25.9 | 27.4 | 27.2 | 31.2 | 34.6 |
现在我们要做一个分组为6的边缘平滑:
这里因为我们是对排好序的数据做处理,所以可以通过二分法进行优化,获取中间分界。
1 | def close(x,a,b): |
1 | bin 1 is : [[7.8, 7.8, 27.2, 27.2, 27.2, 27.2]] |
Chapter 4. 数据变换
数据变换的工作主要是让数据满足某一规则,比如都在某一区间,比如映射到频域等。
主要的工作有:
| Tasks | Description |
|---|---|
| 平滑 | 移除噪声 |
| 标准化 | 缩放区间 |
| 聚合 | 数据立方体构建 |
| 属性/特征构造 | 也就是构建新特征 |
常见数据标准化
1️⃣ 最大最小标准化
2️⃣ Z得分标准化
其中:
3️⃣ 十进制缩放
Chapter 5. 数据集成
这个部分关注的重点有:
- 多源数据集成
- 同一个数据在不同源上的表现
- 检测和识别数据冲突
- 数据冗余
如何解决数据冗余?
冗余的数据很多时候都是由另一个属性派生出来的
所以,我们可以通过相关性检测来识别。
1️⃣ 协方差
对于数值型数据,我们可以计算他的协方差:
表示正相关,表示负相关
2️⃣ *检验
卡方检验就是统计样本的实际观测值与理论推断值之间的偏离程度,实际观测值与理论推断值之间的偏离程度就决定卡方值的大小,如果卡方值越大,二者偏差程度越大;反之,二者偏差越小;若两个值完全相等时,卡方值就为0,表明理论值完全符合。
卡方检验适用于标称属性,假设对于两个属性,有个不同的取值,有个不同的取值,用和描述的数据元组可以用一个相依表显示,其中的个值构成列,的个值构成行。表示属性取,属性取的联合事件。
其中表示联合事件的观测频度,表示期望频度,计算式为:
为元组个数。
例如:

Chapter 6. 数据规约
一个数据库或者数据仓库可能可以存储TB级的数据,如果想对这些数据进行分析或者挖掘是十分困难的
数据规约可以获得数据体积小得多,但产生相同(或几乎相同)的分析结果。
常见的策略
| Strategies |
|---|
| 数据立方体聚合 |
| 尺寸减少----移除不重要的属性 |
| 数据压缩 |
| 数量减少 |
| 离散化和概念层次结构的生成 |
1️⃣ 数据立方体
数据立方体的最低级别(基本立方)
- 针对感兴趣的单个实体的聚合数据
数据多维数据集中的多个级别的聚合
- 进一步减小要处理的数据的大小
2️⃣ 特征选择(即属性子集选择)
-
选择一组最小的功能不同类别的概率分布,这些功能的值尽可能接近给定所有特征值的原始分布
-
减少模式中的特征数量,更容易理解
常见的模式:
前项选择、后向选择、决策树归纳

3️⃣ 主成分分析
给定N维的N个数据向量,求k≤ n个最适合用于表示数据的向量(主成分)
步骤
-
规格化输入数据:每个属性都在同一范围内
-
计算k个向量,即主分量
-
每个输入数据(矢量)是k个主分量矢量的线性组合
-
主要成分按“重要性”或强度递减的顺序排序
-
由于对成分进行了排序,因此可以通过消除弱成分(即具有低方差的成分)来减小数据的大小。(即,使用最强的主成分,可以重建原始数据的良好近似值)
仅适用于数字数据
简单来说,就是:
- 去均值(距平)
- 计算协方差矩阵
- 求解协方差矩阵特征值和特征向量
- 按特征值大小排序,将原始数据映射到特征向量上
4️⃣ 数据压缩
字符串压缩
-
有广泛的理论和完善的算法
-
通常是无损的
-
但在没有扩展的情况下,只能进行有限的操作
音频/视频压缩
-
典型的有损压缩,具有渐进式改进
-
有时可以重建信号的小片段而不重建整个
5️⃣ 小波变换
离散小波变换(DWT):线性信号处理、多分辨率分析
-
压缩近似:仅存储最强小波系数的一小部分
-
类似于离散傅里叶变换(DFT),但更好的有损压缩,局限于空间
方法:
-
长度L必须是2的整数幂(必要时用0填充)
-
每个变换有两个功能:平滑、差异
-
适用于数据对,产生长度为L/2的两组数据
-
递归应用两个函数,直到达到所需长度
6️⃣ 数量减少
通过选择其他更小的数据表示形式来减少数据量
-
参数化方法
- 假设数据符合某些模型,估计模型参数,仅存储参数,并丢弃数据(可能的异常值除外)
-
非参数方法
- 直方图、聚类、抽样
7️⃣ 回归模型
8️⃣ 直方图
9️⃣ 聚类
🔟 采样
Chapter 7. 离散化和概念层级
离散化
-
通过将属性的范围划分为间隔,减少给定连续属性的值数量
-
然后可以使用间隔标签替换实际数据值
-
离散化可以递归地对属性执行
概念层次结构
- 通过收集低级概念(如年龄的数值)并将其替换为高级概念(如年轻人、中年人或老年人),递归地减少数据
在数值型数据上,数据离散化和概念层次生成的经典方法:
-
装箱
- 自上而下拆分,用二进制平均值或中值替换值
-
直方图分析
- 自上而下拆分
-
聚类分析
- 自上而下拆分
-
基于熵的离散化:有监督的、自上而下的分割
-
自然分割:自上而下分割
举个栗子:

1️⃣ 基于熵的离散化
熵是对信息混乱程度的度量,其可以写作:
给定一个样本,将用边界划分为两个连续的区间和,那么分区后的熵就是:
在所有的边界中,我们选择信息增益最大的边界作为划分:
递归执行此过程,这样的边界可以减少数据量,大幅度提高分类精度。
2️⃣ 自然分区分割
可以通过一个简单的规则对数据进行分割。
- 如果一个区间最高有效位上包含3,6,7或9个 不同的值,就将该区间划分为3个等宽子区间; (为7的话,划分成 2,3,2的宽度比例) ;
- 如果一个区间最高有效位上包含2,4,或8个不 同的值,就将该区间划分为4个等宽子区间;
- 如果一个区间最高有效位上包含1,5,或10个不同的值,就将该区间划分为5个等宽子区间;
将该规则递归的应用于每个子区间,产生给定数值属性的概念分层

先找到Low和High,向上向下找最近的最高位,依此划分作为主体。
下一步进行全数据分析,包含了Min向下和Max向上,只不过如果最小区间包含了最小值,将最小区间的坐区间修正到最小值,并添加主体到最大值的分支。
3️⃣ 针对分类数据的概念层次结构的生成
- 由用户或专家在模式级别上明确说明属性的部分/全部排序
- street < city < state < country
- 通过显式数据分组指定一组值的层次结构
- {Urbana, Champaign, Chicago} < llinois
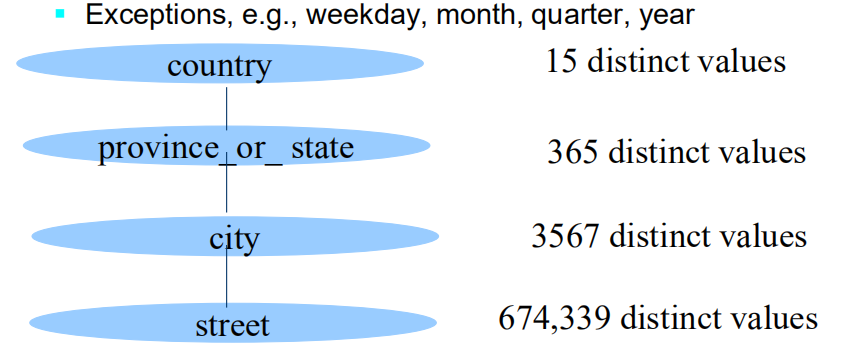
- 通过分析不同值的数量,自动生成层次结构(或属性级别)
- E.g., for a set of attributes: {street, city, state, country}
4️⃣ 自动的概念层次结构的生成
可以根据分析数据集中每个属性的不同值的数量,自动生成一些层次结构
- 具有最明显值的属性被放置在层次结构的最低级别